
前回の記事で、近藤科学から販売されている二足歩行ロボットキット、KXR-L2 アドバンスセットに何を足せば自律動作可能になるかを検討しました。今回は、実際にすべての構成要素をKXR-L2に統合していきます。

HAC機体システム構成図
自律化モジュールに用いる主要部品リスト
- Raspberry Pi Zero 2W
- Raspberry Pi Zero用ケース KSY RASSTCSSAN0H01 Piケース アルミ Sandwich Pi Zero
- RAspberry Pi Zero用拡張基板 サンハヤト UB-RPI03 Raspberry Pi Zero用 ユニバーサル基板
- Webカメラ Buffalo BSW505MBK
- USBハブ Buffalo BSH4UMB04BK
- 降圧レギュレータ Pololu D24V25F5
- 9軸IMU 秋月電子 BNO055使用9軸センサーフュージョンモジュールキット
- USBアダプター 近藤科学 Dual USB アダプターHS
KXRに自律化モジュールを載せる検討
組み立てた通常のKXR-L2の姿がこちらです。改造する前の写真を撮り忘れてしまったので公式画像から引用しました。どっしりしたシルエットで安定感があります。

(引用元: https://kondo-robot.com/product/03130)
(引用元: https://kondo-robot.com/product/03130)

(引用元: https://kondo-robot.com/product/03130 )
カメラ、Raspberry Pi、DCDCなどを機体に載せるにあたって、それぞれ別々に搭載することはあまりしたくありません。理由としては、自律動作システムの「モジュール化」を図りたいためです。今回使用しているロボットはKXR-L2ですが、第3回の記事で挙げたKHRのような別の市販二足歩行ロボットキットや自作のロボットにも、固定部品の変更などだけで同じシステムを搭載可能にしたいと考えています。そのためには、構成要素を一つのパッケージとしてまとめるモジュール化が理想的です。
カメラの寸法は50×80×51mm、Raspberry Pi Zero 2Wの寸法は65×30×5mmとなっています。一つ一つの構成要素は小さいですが、全て搭載するとなるとかなり大きなモジュールとなりそうです。載せられそうな箇所を探しましょう。
(引用元: https://kondo-robot.com/product/03130)
胸の部分は面積も広く載りそうですが、モジュールがかなりロボットから出っ張ることになります。転倒時に真っ先に地面にぶつかる箇所にカメラやラズパイを配置するのは不安です。見た目もスマートに収まらないかもしれません。

(引用元: https://kondo-robot.com/product/03130)
バックパックに載せることができれば、電装部品の場所を統一できアクセスがしやすいですが、ここはRCB-4 miniが占有しておりスペースが不足しています。

(引用元: https://kondo-robot.com/product/03130)
それにしてもKXRの肩幅は広い…
汎用性の高い自律化モジュールの設置場所

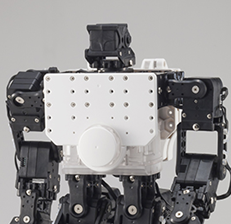
改造後のKXR-L2
結論、このような搭載方法となりました。カメラ、ラズパイ、USBハブをすべてまとめた拡張モジュールを頭部に搭載しています。KXRのような小型二足歩行ロボットは、サーボモータの寸法に機体寸法が縛られるため先ほどの画像のような広い肩幅になりがちで、KXRの肩幅は197mm、同じ近藤科学のKHR-3HVの肩幅は194mmとほぼ同じとなっています。頭部をこのモジュールで置き換える方式をとることで、ほかのロボットにも容易に搭載できる汎用性の向上を狙っています。
次回
次回の記事では、この拡張モジュールの製作について、より詳しく書いていきます。一足先にモジュールを製作したい方は、3Dデータを公開していますのでそちらをご確認ください。

