

こんにちは。koraです。
今回はサーボモータの軸配置を考えてみました。
せっかくの研修ですので、少し凝った配置にしたいと思います。
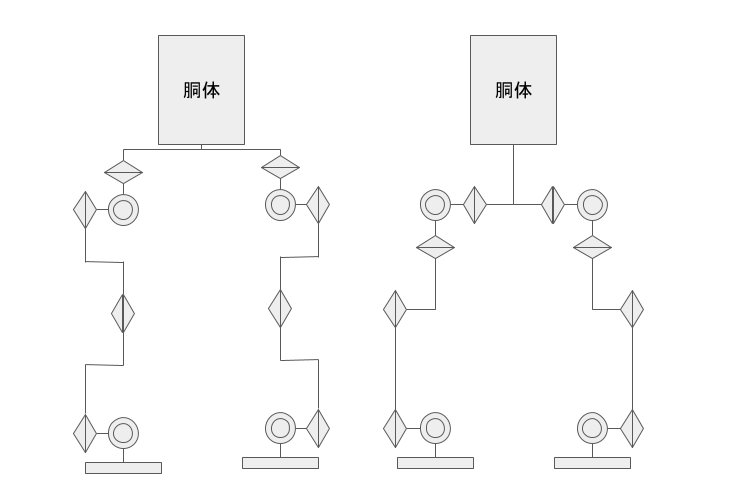
よく見る片足6自由度の二足歩行ロボットの構成は下図の左です。脚をひねる場合、股関節の上にある軸を回転させます。
今回は下図の右の構成にします。脚をひねるときは腿の軸を使って動かすことになります。
この構成では次のような問題が考えられます。
- 片持ち軸が増えるため剛性が低くなりやすい。
- 左図の構成では幾何学的に逆運動学が解けたが、右図では難しい。
- 股関節距離が広がるため、歩行時に左右の振れ幅が大きくなってしまう。
逆に言えば、それだけ学ぶことが多いということです。勉強しながら以下の対策をとることにします。
- 片持ち軸で剛性を確保するため、ハードウェアの設計はCRANE-X7を参考にします。
- 逆運動学は、解析的に解くのではなく、ヤコビ行列を使って数値的に解きたいと思います。これは細田先生の実践ロボット制御で勉強しながら実装します。
- 股関節はギアなどで動力伝達し、サーボモータをずらして配置することで出来るだけ股関節距離を縮めます。また、歩行シミュレーションで安定する歩行パターンを探します。
対策が決まりましたので、来週から始める詳細設計に反映していきたいと思います。
