

こんにちは
まえけんです。
前回はとりあえずの構成を決めたので
今回はCAD図面上でこねくり回してみたいと思います。
二足歩行ロボットはKHR-2のサンプルモーションなんかで遊んだ程度なので
今回もマウス研修の時同様に社内の先輩方にアドバイスをもらいながらサーボの配置を考えていきます。
まず最初に、軸が一直線上にあると計算で歩行が解きやすいとのことなので
最低限そこは守って配置していきます。
しかし、なかなか軸間などイメージが出来ず悩んでいると
先輩方からは、モーションを決めればサーボ配置が決まると聞いたのですが
モーション自体のイメージが付かないため、とりあえず機体を作って
モーションを作ってから細かいことは考えようという方針に転換。
また、機体が結構重いのと私自身加工精度が良くないので曲げ部品を減らす方向で
フレームを作ってみた結果こんな感じで足と胴体を作ってみました。

まだ胴と腰は繋がっていませんが1週間であらかた人らしくなりました。
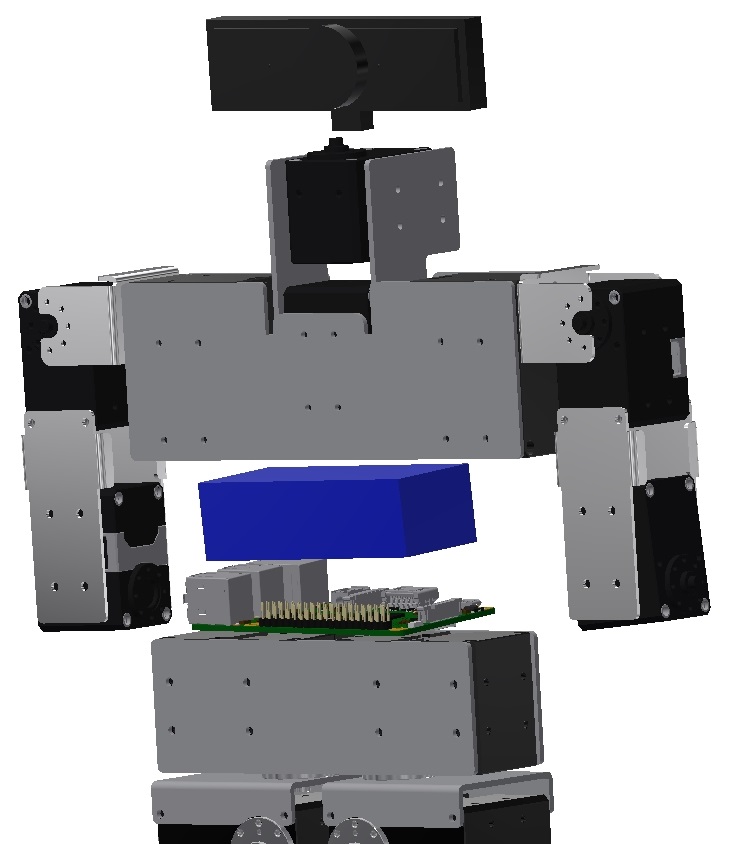
腿の付け根のところでロールとピッチの軸間が伸びてしまって
なにか気に入らない印象がありますが、具体的にこう気に入らない!とは言えずモヤモヤしてます。
(先輩からは、それが動作に影響を及ぼすだろうとわかっていはいるものの言語化出来ないのでしょう。とのこと)

来週には胴体を繋いで削り始めてみようかと思います。
ちなみに別のサイトではマイクロマウス研修のブログも連載しております!
こちらもぜひご覧ください!
