 CRANE-X7
CRANE-X7 小型6軸力覚センサを用いたCRANE-X7でのピッキング
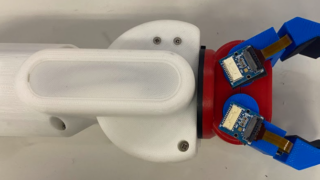
こんにちは、Nです。本ブログでは、CRANE-X7とミネベアミツミ株式会社様の小型力覚センサを使った簡単な重量計測による選別を行いました。こちらのセンサは直径9.6mmで重量は3gというとても小さなセンサになっています。力覚センサーの活用マ...
 CRANE-X7
CRANE-X7  2024年度CRANE-X7開発研修
2024年度CRANE-X7開発研修  2024年度CRANE-X7開発研修
2024年度CRANE-X7開発研修  2024年度CRANE-X7開発研修
2024年度CRANE-X7開発研修  CRANE-X7
CRANE-X7  CRANE-X7
CRANE-X7  CRANE-X7 CRANE-X7
CRANE-X7 CRANE-X7  CRANE-X7
CRANE-X7  CRANE-X7
CRANE-X7