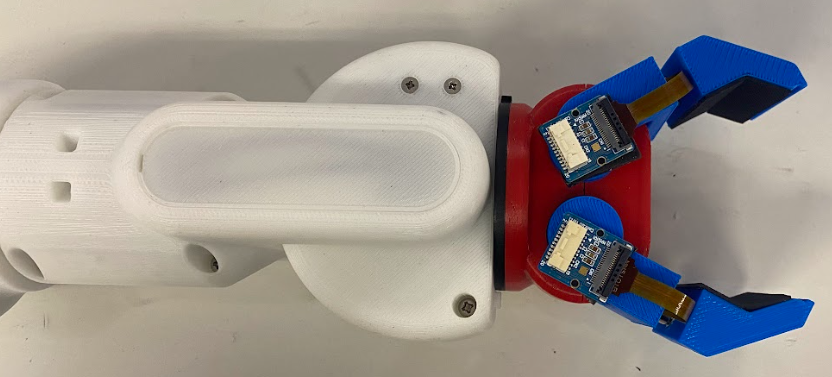
こんにちは、Nです。本ブログでは、CRANE-X7とミネベアミツミ株式会社様の小型力覚センサを使った簡単な重量計測による選別を行いました。こちらのセンサは直径9.6mmで重量は3gというとても小さなセンサになっています。
力覚センサーの活用
マニピュレータのエンドエフェクタに力覚センサを装着する研究は多く行われています。たとえば、視覚情報と力覚センサを組み合わせたセンサフュージョンによる把持姿勢の最適化や、模倣学習と力覚センサを活用したマニピュレータの動作獲得など、多様な実験が行われています。
本記事の概要
本記事では、マニピュレータと力覚センサの実用例としてペットボトルの重量を計測して重量に応じて選別するデモンストレーションを紹介します。
デモンストレーションでは、CRANE-X7とミネベアミツミ株式会社様 の6軸力覚センサを使用しました。
ソフトウェア構成
力覚センサのソフトウェアは、ROS2の通信用のパッケージを作成しました。

マニピュレータのソフトウェアは、CRANE-X7の標準パッケージを用いました。変更点としてエンドエフェクタに力覚センサを取り付けたURDFに変更しました。
重量の計算
今回は、空のペットボトル20gと水の入ったペットボトル200gを選別していきます。
力による重量の計算
力覚センサから取得した力からペットボトルの重量を計測します。
以下の基本的な運動方程式から求めて行きます。
$$ F = mg $$
この式を元に空のペットボトルと水の入ったペットボトル重量を計算します。
空のペットボトル
\begin{align}
F &= 0.02 * 9.8 \\
&= 0.196 [N]\\
\end{align}
水の入ったペットボトル
\begin{align}
F &= 0.2 * 9.8 \\
&= 1.96 [N]\\
\end{align}
モーメントによる重量の計算
力覚センサから取得したモーメントからペットボトルの重量を計測します。
以下の基本的なモーメント式から求めて行きます。
\begin{align}
M &= LF \\
M &= Lmg\\
\end{align}
今回のエンドエフェクタに取り付けた力覚センサと把持点の距離は0.015mになっています。
$$ M = 0.015*mg $$
この式を元に空のペットボトルと水の入ったペットボトルのMを計算します。
空のペットボトル
\begin{align}
M &= 0.015 * 0.02 * 9.8 \\
&= 0.00294[Nm]\\
\end{align}
水の入ったペットボトル
\begin{align}
M &= 0.015 * 0.2 * 9.8 \\
&= 0.0294[Nm]\\
\end{align}
力覚センサの力の分解能は0.02[N]、モーメントの分解能は0.002[N?m]であるため力覚センサと把持点が近いこのような状況ではモーメントによる計測をしてもあまり変化がないため、今回は力による重量計測を行いました。
デモンストレーション動画
こちらはデモンストレーションの動画です。エンドエフェクタに取り付けた力覚センサの値を利用してペットボトルの重量を測定し、水が入っているペットボトルは画面左側に、水が入っていないペットボトルは画面右側に選別しています。
まとめ
今回使用したセンサはミネベアミツミ株式会社様のMMS101になります。
センサに関するお問い合わせはこちらのページからお願いします。
![]()
MMS101とCRANE-X7を組み合わせたシステムにご興味がある方は
下記から弊社にご連絡ください。
sales@rt-net.jp