
こんにちは。koraです。
気がつけば前回の記事から半年以上経ってしまいました。
そうこうしているうちに ROS Melodic の EOL が 2023 年 4 月に迫っており、残り 1 年を切っています。ROS 1 の次の Distribution である Noetic に移行するのも手ですが、せっかくなので ROS 2 に移行したいと思います。
ROS 2のディストリビューション
2022年6月現在、ROS 2 の ディストリビューション は Foxy、Galactic、Humble がサポートされています。Foxy は Melodic と同じ 2023 年 4 月に EOL なので今から移行するメリットは薄いかもしれません。Humble は 2022年5月にリリースされたばかりで、EOLは5年後の 2027年5月となっています。新しい分、安定していない可能性もありますが、そこは研修ですのであえて挑戦してみましょう。
Ubuntu 22.04 のインストール
Humble でサポートされている Ubuntu のバージョンは Ubuntu 22.04 (amd64, arm64) および Ubuntu 20.04 (amd64) です。Raspberry Pi は arm なので OS の選択肢は Ubuntu 22.04 に絞られるわけですが、幸いRaspberry Pi 用の Ubuntu 22.04 イメージは公式から提供が始まっています。
最も簡単に SD カードに OS を焼く方法として Raspberry Pi Imager を使うものがあります。すでに Ubuntu PC を持っている場合、以下のコマンドで Raspberry Pi Imager をインストールすることができます。
$ sudo snap install rpi-imager
PC にマイクロ SD カードを接続して、Raspberry Pi Imager を起動します。

OS を書き込む前にマイクロ SD カードをフォーマットしておきましょう。
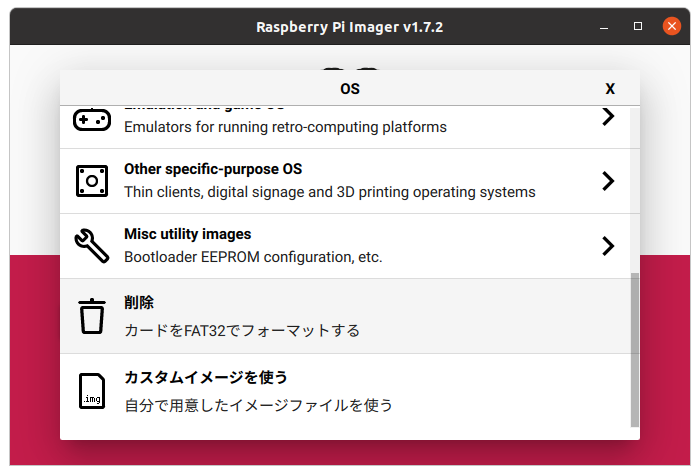
Raspberry Pi OS ではなく、Other general-purpose OS → Ubuntu → Ubuntu Desktop 22.04 LTS (RPi 4/400) を選択して書き込みます。

書き込んだマイクロ SD カードを Raspberry Pi 4B に挿入し、ディスプレイとキーボードを接続して電源を入れます。後は Ubuntu の初回セットアップです。言語選択、キーボード選択、タイムゾーン、ユーザー名とパスワードの設定、Wi-Fi の設定をします。セットアップが終わると Ubuntu 22.04 のデスクトップが表示されます。

ROS 2 Humble のインストール
さっそく ROS 2 Humble をインストールしましょう。Ubuntu 向けにはビルド済みのバイナリが Debian package として提供されているので、Ubuntu (Debian) を参考にインストールします。
ROS 2 のインストールにあたって、apt で公開されているリポジトリからパッケージをダウンロードするわけですが、そのパッケージが信頼できるものか確認するため専用の GPG キーが必要です。以下のコマンドで GPG キーを追加します。
$ sudo apt update && sudo apt install curl gnupg lsb-release $ sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
そして以下のコマンドで ROS 2 のリポジトリを追加します。
$ echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
リポジトリのインデックスをアップデートしてシステムを更新します。
$ sudo apt update $ sudo apt upgrade
注意事項として、ROS 2 のインストール前に upgrade を実行しておかないと、ROS 2 のインストールによって重要なシステムパッケージが削除されることがあるそうです。

以下のコマンドで Desktop 版の ROS 2 Humble をインストールします。ROS の基本機能だけでなく、可視化ツールの RViz やデモなどもインストールされます。
$ sudo apt install ros-humble-desktop
動作確認
以下のコマンドで ROS 2 Humble の環境設定を行います。(新しいターミナルを開く度に呼ぶ必要がありますが、面倒な場合は ~/.bashrc に追加することもできます。)
$ source /opt/ros/humble/setup.bash
ターミナルを 2 つ開いて、それぞれでデモを実行します。
$ ros2 run demo_nodes_cpp talker
$ ros2 run demo_nodes_py listener
下図のように、talker から listener にメッセージが送られていることを確認できたら成功です。

おわりに
Raspberry Pi 4B に ROS 2 Humble をインストールして動作確認するところまでできました。RealSense や Dynamixel のドライバ、MoveIt 関連なども更新していく必要があるので、もう少し移行作業は続きそうです。

