
アールティのししかわです。
一年半にわたるマイクロマウス研修が無事終了しました。今回から気持ちを新たに、二足歩行ロボットを題材とした研修がはじまります。第1回目は研修の内容について紹介します。
アールティの二足歩行ロボット研修

当社アールティでは原則として全てのエンジニアが毎日午前中に技術研修を行います。全員必修のマイクロマウス研修を終えた後も、伸ばしたい能力に応じて様々な研修メニューが用意されています(自分で研修内容を提案することも可能です)。
「二足歩行ロボット研修」では、文字通り二足歩行ロボットを設計・製作して、後述のロボット競技会に参加します。ロボット全般にわたる技術力やマネジメント力向上を目指します。
現在アールティでは、私を含め6名のエンジニアが二足歩行ロボット研修に取り組んでいます。
※責任者コメント:会社の都合やアドバイスにより一旦中断してもらって、別の研修をしている方もいます。

自律移動二足ロボの競技会「Humanoid Autonomous Challenge」
「Humanoid Autonomous Challenge(通称HAC)」は、アールティが考案・主催する「自律移動二足歩行ロボットのための競技会」です。
詳しいルールや参加できる機体のレギュレーションがスライドにまとめられています。本記事では要点をかいつまんで紹介します。

基本ルール
ロボットが競技フィールド上を二足歩行しながら、道中のボールに触って、最初の位置に戻ってくるまでの時間を競います。

HACで使うフィールドとボール(並べ方は一例)
フィールドは90cm四方のパネルを6個並べて作られます。その並び順を事前に知ることはできません。ボールは道の上に2つ以上(事前に告知)置かれますが、そのうち一つは台座の上に置かれています。ボール場所を事前に知ることはできません。
ロボットは白線の手前からスタートして、全てのボールに触り、スタートまで戻ってこなければなりません。また、フィールド外に飛び出したり、フィールド内でも転倒する(足裏以外の部位が床につく)と、その回はリタイヤとなります。
ロボットは競技中は自律移動する必要があります。操作者はスタート・ストップの指示以外(たとえばフィールドやボールの位置情報)をロボットに入力してはいけません。ただし、計算リソースはロボットの外に用意してもよいです(つまりロボットが各種演算のためにサーバやクラウドサービスと通信してもよい)。
制限時間5分以内で3回まで歩行ができ、その中の最短タイムが記録になります。
要はボールを触って帰ってくるだけです。簡単ですね!私の息子(3歳)でもできそうです。ただこれを「二足歩行のロボットが」「自律的に」やらないといけないのが難しいところです。
参加できる機体:市販のキットもOK
続いて参加できる機体のレギュレーションについてです。機体ルールのページに詳細が載っています。
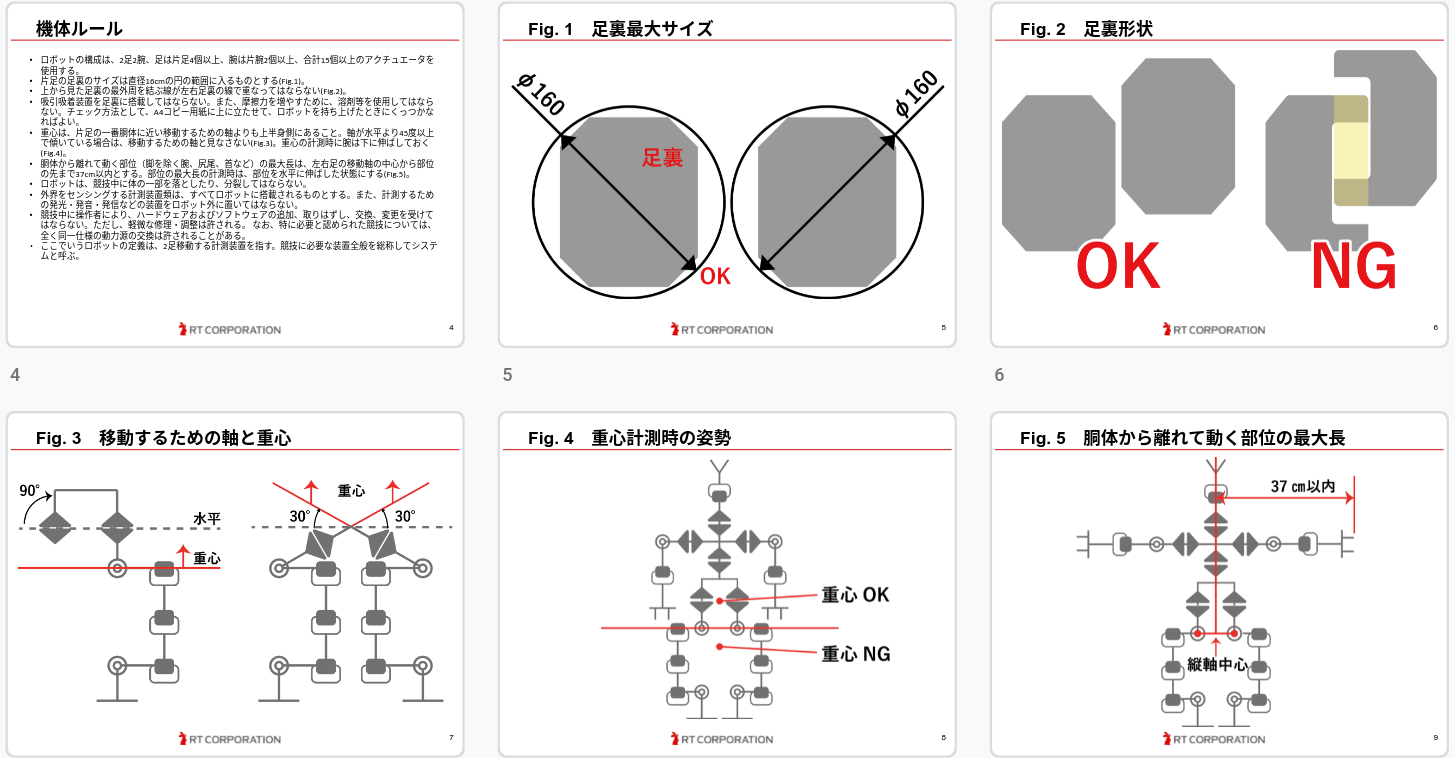
機体ルールの詳細はスライドを参照
主なルールを抜粋します。
- ロボットは腕と足を2本ずつ持つこと
- 足裏のサイズは片足が直径16cmの円に収まること
- 上から見た時、足裏の最外周を結ぶ線が重なってはいけない
- 要はリンク先のような形の足は禁止
- 足裏に吸着装置を付けてはいけない
- ロボットは、競技中に体の一部を落としたり、分裂してはならない。
- センサ類は、すべてロボットに搭載されるものとする。
- ロボットの重心が、足の付け根の軸よりも上側にあること
なお、条件を満たせば市販のロボットでも参加可能です。例えばQ&Aではソフトバンクロボティクス社のNAOで参加できるという回答があります。
競技の特徴
競技の特徴は一言で「マイクロマウスの二足歩行バージョン」といえます。なぜならマイクロマウスと同様、ロボットの自律性に重きが置かれているからです。実際、いくつかのルールはマイクロマウスと似ていますね。
- 地図やボールの情報は事前に知らされない
- 競技中は人が指示を与えることができない
このルールにより、ロボットは自分でどう動けばよいかを考えて行動する必要があります。
マイクロマウスでは迷路探索や走行制御など複数のタスクを行いますが、HACでも次のようなタスクを統合する必要があるでしょう。
- ボールや道を認識する
- 経路を決定する
- 歩く
- ボールを触る
一方、マイクロマウスとの違いとして(当然ですが)二足歩行で進む必要があります。特にフィールド上で転倒するとその回は即リタイヤという点は、なかなかシビアです。転びづらい設計、そして歩行中もバランスをとるための制御が必須です。オリジナル機体を製作する際にはかなり設計を練る必要がありそうですね。
研修の流れ
二足歩行ロボットの経験者を除き「1. 市販のロボットキットを組み立てて競技を行う」そして「2. いちからオリジナル機体を自作する」という流れが推奨されています。マイクロマウス研修と同じですね。
キット製作研修
ROBOTIS社の「ROBOTIS ENGINNER KIT」を使います。ROBOTIS社のDynamixelサーボモータを使って3種類のロボットを製作できるキットです。この研修では人型ロボットの「MAX-E1」(画像右端)を作って動かします。

ROBOTIS ENGINEER KIT
shotaさんが一足早く研修を始めています。
自作研修
基板などを全て自作します。マウスの時よりさらに高度な機械設計能力が求められます。
以上です。
マイクロマウス研修に続いてロボット初心者にもわかりやすくを心がけて書いていきます。ぜひご覧ください!
→次の記事


