






教育事業
RT Corp. Research & Development Robots Line Up
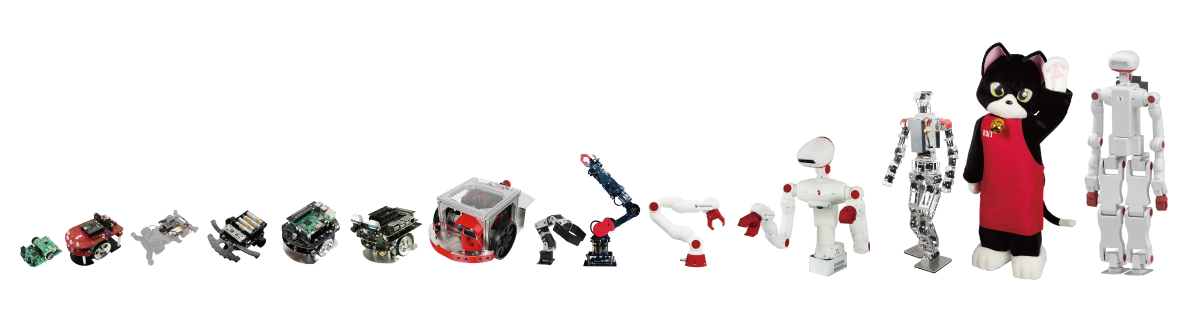








We also offer. wheel type educational/research platform robots.
If interested, please contact us.

Company Information:
RT Corporation
Location : Akihabara, Tokyo.

We are a company based in Akihabara, Tokyo, that designs, develops and provides Robots and AI solutions. Depending on your needs, we offer standard and/or customized platform robots for education/research institutes, and service robots for our industrial clients (food and other).






